Serve as chair for Computer Vision Session of the USC Deep Learning Course 2020 Spring. More details can be accessed here.
Posts

Guest Lecture for EE599-2020 (USC Deep Learning Course)
Presentation slides can be accessed via browser on computer or mobile devices: here.
Guest Lecture for CSCI699-2020 Computational Human-Robot Interaction
Presentation slides can be accessed via browser on computer or mobile devices here
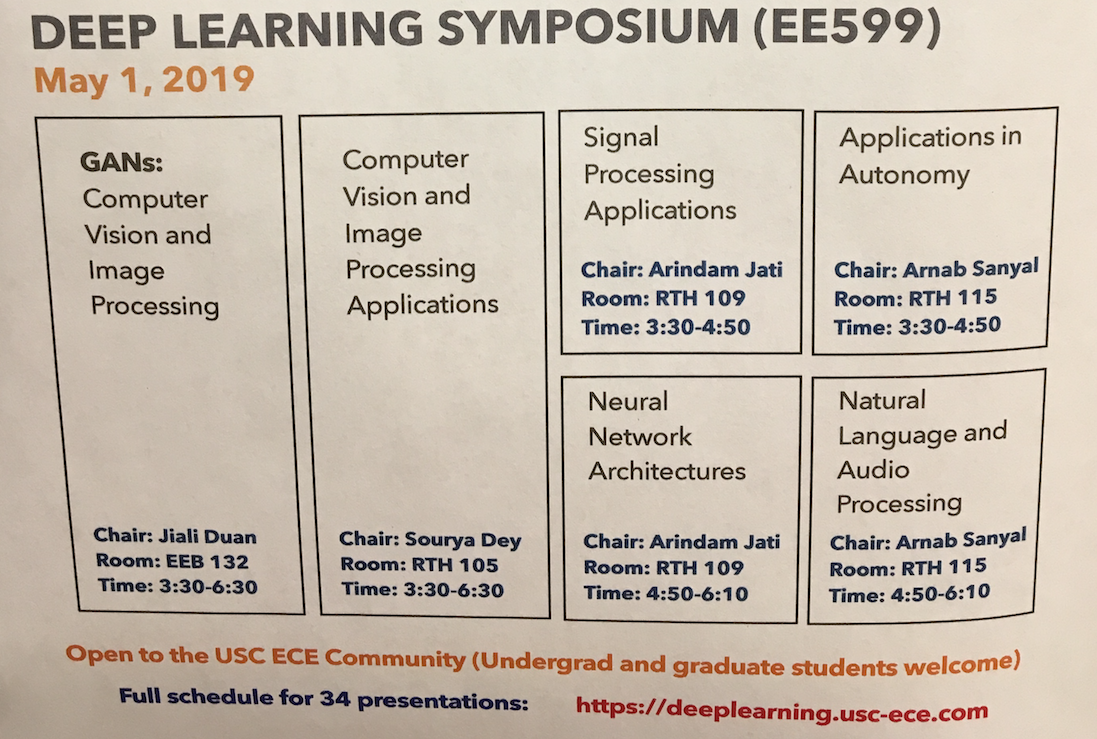
USC Deep Learning Presentation
As TA for USC Deep Learning course (EE599), I was impressed by the representations at the end of this semester from graduate students of USC. More details can be accessed here.
Group Seminar Presentation
Group seminar report, summarizing progress with regard to “LEARNING HUMAN-ROBOT AND ROBOT-WORLD INTERACTION”. Online website available here.

USC Robotics Open House
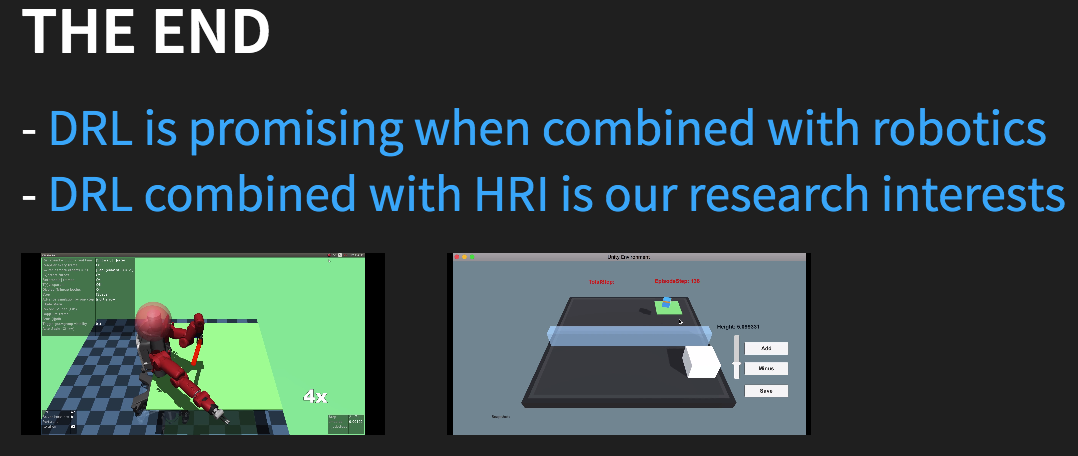
Our demo in exhibition for USC Robotics Open House. My colleagues and I presented “Robust Grasping via Human Adversarial” to visitors and explained the motivation behind the algorithm. Our demo is implemented in customized simulation environment based on physics engine mujoco and supports real-time human interactions.
During the day, we give users the opportunity to apply perturbations to objects via keyboards and mouse, and we show that the manipulator’s grasping skill as well as robustness increases over time.
Guest Lecture for EE599 (USC Deep Learning Course)
Presentation slides can be accessed via browser on computer or mobile devices: here.
Robust Grasping with Adversary
In the context of reinforcement learning, Mujoco + gym is more popular than Gazebo in research that involve robotics. However, mujoco-py released by OpenAI doesn’t provide full flexibility compared to original Mujoco C++ API. In a recent work of mine, I upgraded mujoco-py==1.5.0 that supports:
Interactive manipulation as provided by simulate in Mujoco, written in Cython
Force visualization similar to deepmind-control but allows for headless rendering
The code is available at https://github.
Review DDPG
Deterministic policy gradient is a variation of A2C, but is off-policy. In A2C, the actor estimates the stochastic policy, either in the form of probability distribute over discrete actions or, the parameters fo normal distribution. DPG also belong to the A2C family, but its policy is deterministic. This makes it possible to apply the chain rule to maximize the Q-value.
DPG has to components. First is the actor. In a continuous action domain, every action is a number, so the actor network will take the state as input and output N values, one for each action.
Language guided visual 3D indoor navigation
Group Seminar Presentation on RL introduction
This group seminar presents an introduction to RL and its interesting applications. See my slide at “https://davidsonic.github.io/summary/#/".
A more fundamental intro is at here.
MIT-LIDS ALUM website now online
Full-featured MIT-LIDS ALUM website is now deployed on Amazon webservice at: http://www.lids-alum.org . It now serves as the portal site for MIT ALUMs.